步骤/方法
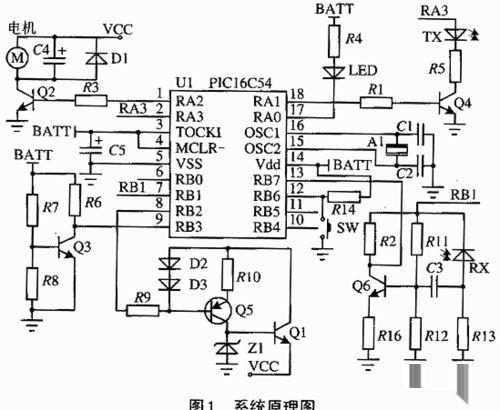
1、pic16c54概述: 1结构图: pic16c54主要资源: * 512×12位eprom * 25字节通用ram * 12根双向i/o线 * tmr0定时器/计数器 * 上电复位por电路 * 复位定时器 * 自振式看门狗wdt.
2、指令周期: pic16c54采用8位宽的数据总线和12位宽指令总线相互独立的哈佛harvard结构,与其它一些单片机相比,程序代码更加紧凑,指令执行速度更快。图2 所示的是 时钟/指令时序图 如图2所示,从引脚osc1输入或振荡电路产生的时钟信号在内部经四分频产生四个不重叠的时钟 q1,q2,q3,q4。程序计数器pc在每个q1节拍间加1,指令在q4节拍从程序存储器中取出并锁存于指令寄存器中,在下一指令周期被译码并执行。因此,在程序执行过程中,取指令与执行指令可重迭进行,即当一条指令被执行时,下一条指令已从程序存储器中读出。
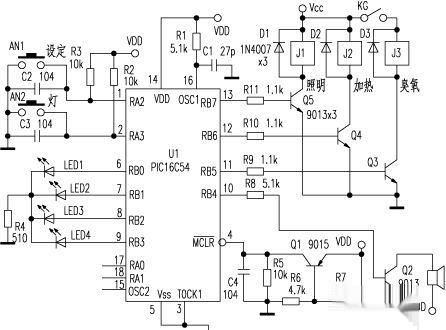
3、引脚功能说明 ra0-ra3:可位控4位双向i/o口,输入为ttl电平 rb0-rb7:可位控8位双向i/o口,输入为ttl电平 tocki:定时器/计数器tmr0的外部触发计数信号输入端。软件定义tmr0为计数器时,此引脚上的信号上升沿或下降沿用于计数,可通过软件设置option寄存器相应的控制位选择触发边沿,当tmr0为内部时钟源时,该引脚当接vdd或vss,以减少功耗。 mclr:当为低电平时,单片机复位 vss:地端 vdd:电源电压 osc1:振荡信号输入端 osc2:振荡信号输出端
